

Product Details
Miejsce pochodzenia: Shenzhen, Chiny
Nazwa handlowa: JIG
Numer modelu: ZCT62/85130/200/280
Payment & Shipping Terms
Minimalne zamówienie: 1 sztukę
Zasady płatności: L/C, D/A, D/P, T/T
Współczynnik redukcji: |
5-10 |
Znamionowy wyjściowy moment obrotowy: |
4-130N. 4-130 N. M M |
Maksymalny wyjściowy moment obrotowy: |
3-krotność znamionowego momentu obrotowego |
Dokładność pozycjonowania: |
≤ 3anc-min |
Dopuszczalne obciążenie osiowe: |
8000N |
Precyzyjne życie: |
30000 godzin (praca przerywana) |
Wydajność transmisji: |
90-95% |
Hałas: |
≤ 67dB |
Metoda instalacji: |
każdy |
Współczynnik redukcji: |
5-10 |
Znamionowy wyjściowy moment obrotowy: |
4-130N. 4-130 N. M M |
Maksymalny wyjściowy moment obrotowy: |
3-krotność znamionowego momentu obrotowego |
Dokładność pozycjonowania: |
≤ 3anc-min |
Dopuszczalne obciążenie osiowe: |
8000N |
Precyzyjne życie: |
30000 godzin (praca przerywana) |
Wydajność transmisji: |
90-95% |
Hałas: |
≤ 67dB |
Metoda instalacji: |
każdy |
Charakterystyka:
1"Puszcza struktura"
2Wysoka dokładność pozycjonowania
3Wysoka sztywność
4Wysoka dokładność obrotu
5Każda konfiguracja silnika
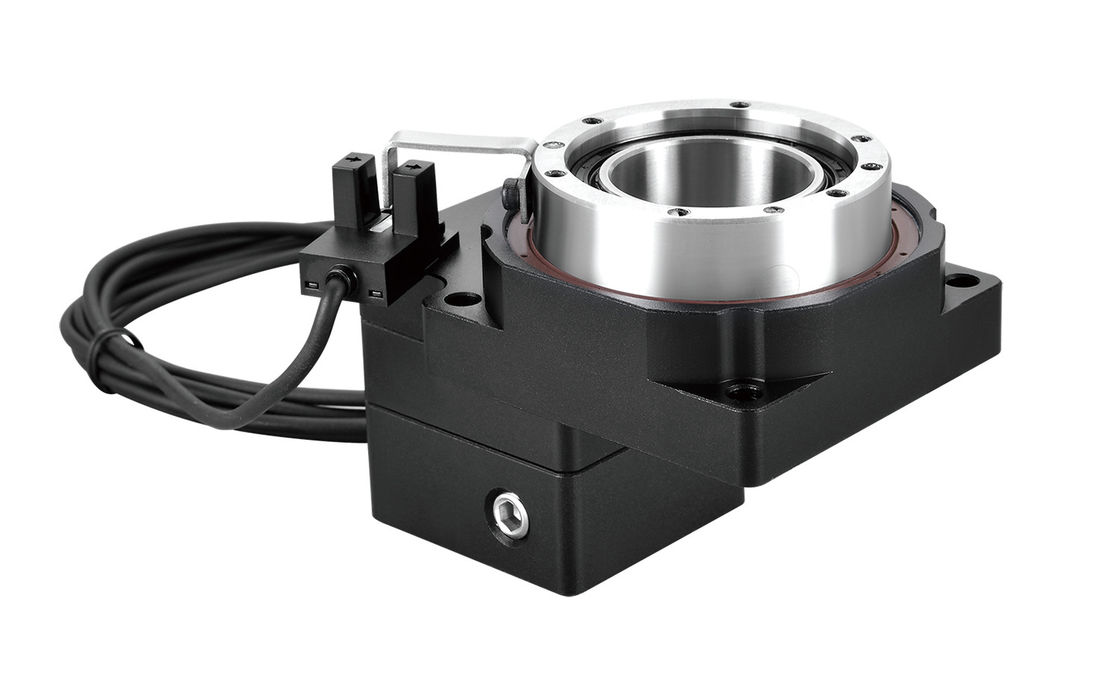
Pustka platforma obrotowa bezpośrednio zastępuje rozdzielacz kam i silnik DD.Pustka platforma obrotowa to wysokiej precyzji cyfrowa platforma obrotowa z korzyścią niskiej ceny i wysokiej dokładności, zajmujący silny rynek w kategorii platform obrotowych.
aplikacja
1. Obrotowy stół roboczy w transformacji automatyzacji linii produkcyjnej
2. Obrotowe koła w maszynach do oznakowania laserowego lub grawerowania
3. Oś obrotu w precyzyjnym mechanizmie wyrównania
4Łącznik ramienia robota o lekkim obciążeniu
5. Wysokiej precyzji biegów napędu bezpośredniego
6Wysoka precyzja, wysoki moment obrotowy, wysoka sztywność, łatwość obsługi, w połączeniu z wysokiej wydajności silnikami stopniowymi z zamkniętą pętlą
zalety
1. Bezpośrednie połączenie: konstrukcja wału wyjściowego dysku może być bezpośrednio podłączona do obróbki obciążonej dyskiem, oszczędzając projekt, koszty pracy debugowania i połączenie części łączących
Koszty zamówienia złączy.
2Duża kalibrowa, puste platforma obrotowa: ułatwienie podłączenia przewodów i rur.
3Przekaz biegów: osiągnięcie precyzyjnego pozycjonowania.
4. Pozycjonowanie w krótkim czasie: może osiągnąć pozycjonowanie obciążeń inercyjnych w krótkim czasie.
Wspólne formy strukturalne
Koaksjalny
Oś silnika i oś środkowa stołu obrotowego są koncentryczne i tworzą bezpośrednią platformę obrotową
Rodzaj paraksjalny
Połączona bocznie platforma obrotowa z wałem silnika i centralnym walem stołu obrotowego w zachowaniu równoległym
kąt prostokąty
Oś silnika jest prostopadła do osi środkowej stołu obrotowego i tworzy platformę obrotową osi bocznej
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

